Core concepts
This page introduces the main features and modules in Flightmare. Detailed explanations of the different subjects can be found on their corresponding page.
Server and Client
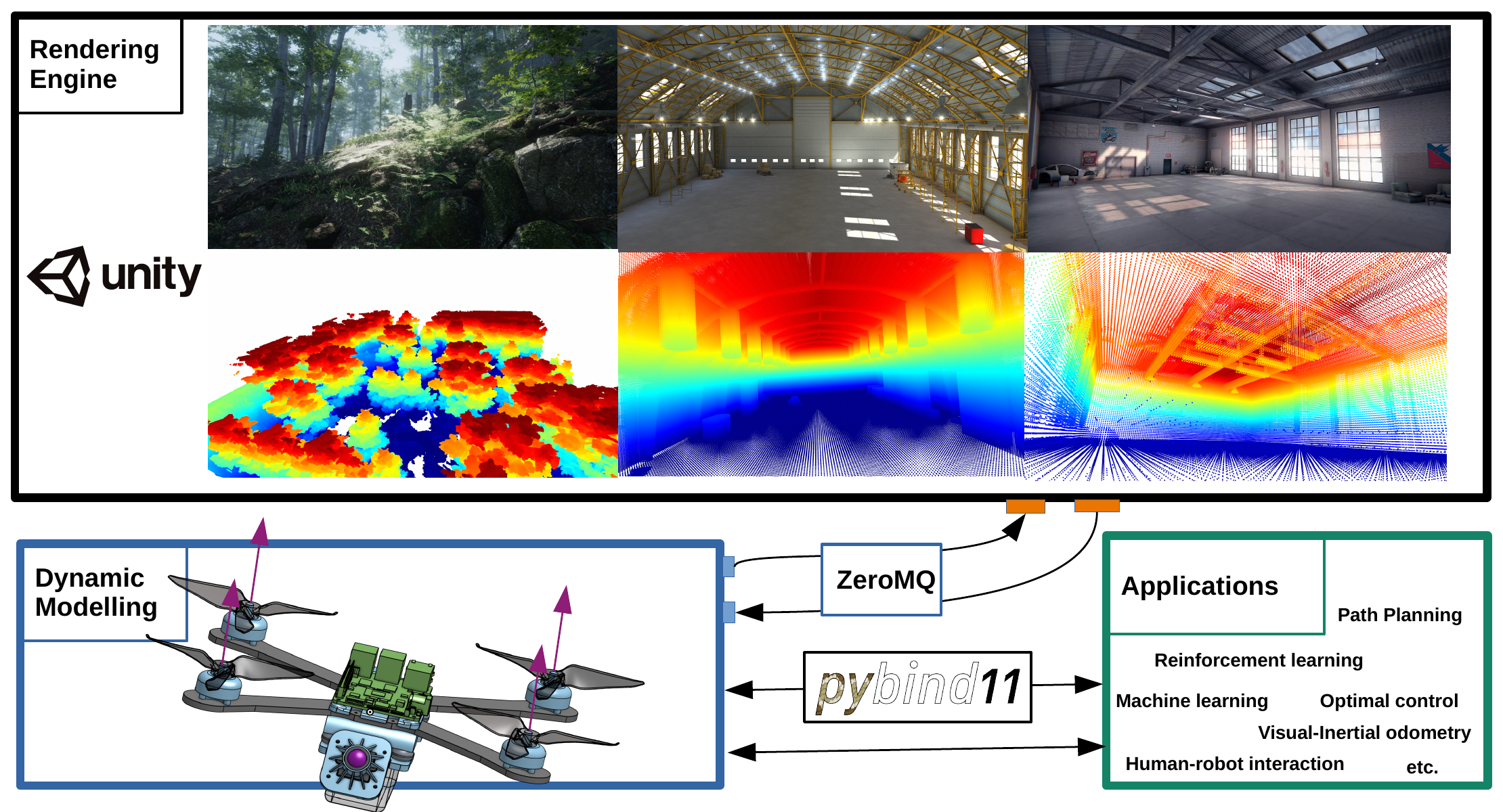
The client is the module the user runs to model the dynamics in the simulation. A client runs with an IP and a specific port. It communicates with the server via terminal.
The server is the rendering engine representing the simulation. It contains the main methods to spawn quadrotors, change the environment, get the current state of the environment, etc.
Quadrotor and Objects
An actor is anything that plays a role in the simulation and is loaded dynamically into the environment.
Quadrotor
Sensors
Gates
The prefabs of the actor can be found in Assets/Resources/ on the server-side. They can be added by the client over the unity-bridge.
Sensors and data
Sensors wait for rendering to happen, and then gather data from the simulation. They call for a function defining how to handle the data. Depending on which, sensors retrieve different types of sensor data.
A sensor is an actor attached to a parent quadrotor. It follows the quadrotor around, gathering information about the surroundings. The following sensors are available:
Cameras
RGB
Depth
Semantic segmentation
Collision detector
Soon to be added
IMU sensor
Lidar raycast
Optical flow camera
Event-based camera
Point Cloud
Flightmare can extract the point cloud of a scene. This data can be used for path planning.